Posts
It is a space where you record and post simple development projects
or things you need while developing.
You can also find various posts through search.
Lists
RPMsg 포팅
rpmsg 포팅 노트
[Linux] GENERIC MSI
리눅스 커널의 MSI
[Linux] IRQ management
리눅스 커널의 인터럽트 관리
[Linux] Initramfs
Initramfs 만드는 방법과 수정하는 방법
[U-BOOT] 드라이버 ID정보와 dts활용
U-BOOT 하나의 드라이버로 여러 칩셋을 커버하기 위한 정보 매핑 및 활용
[Trace32] Trace32 기본 내용 정리
Trace32의 기본적인 명령어와 사용방법을 익힌다.

yolov8 모델 사용하기 (CPU vs NPU)
오드로이드 M1S의 NPU를 사용해서 Yolo 모델을 돌려보고 오브젝트 디텍팅도 해보겠습니다.
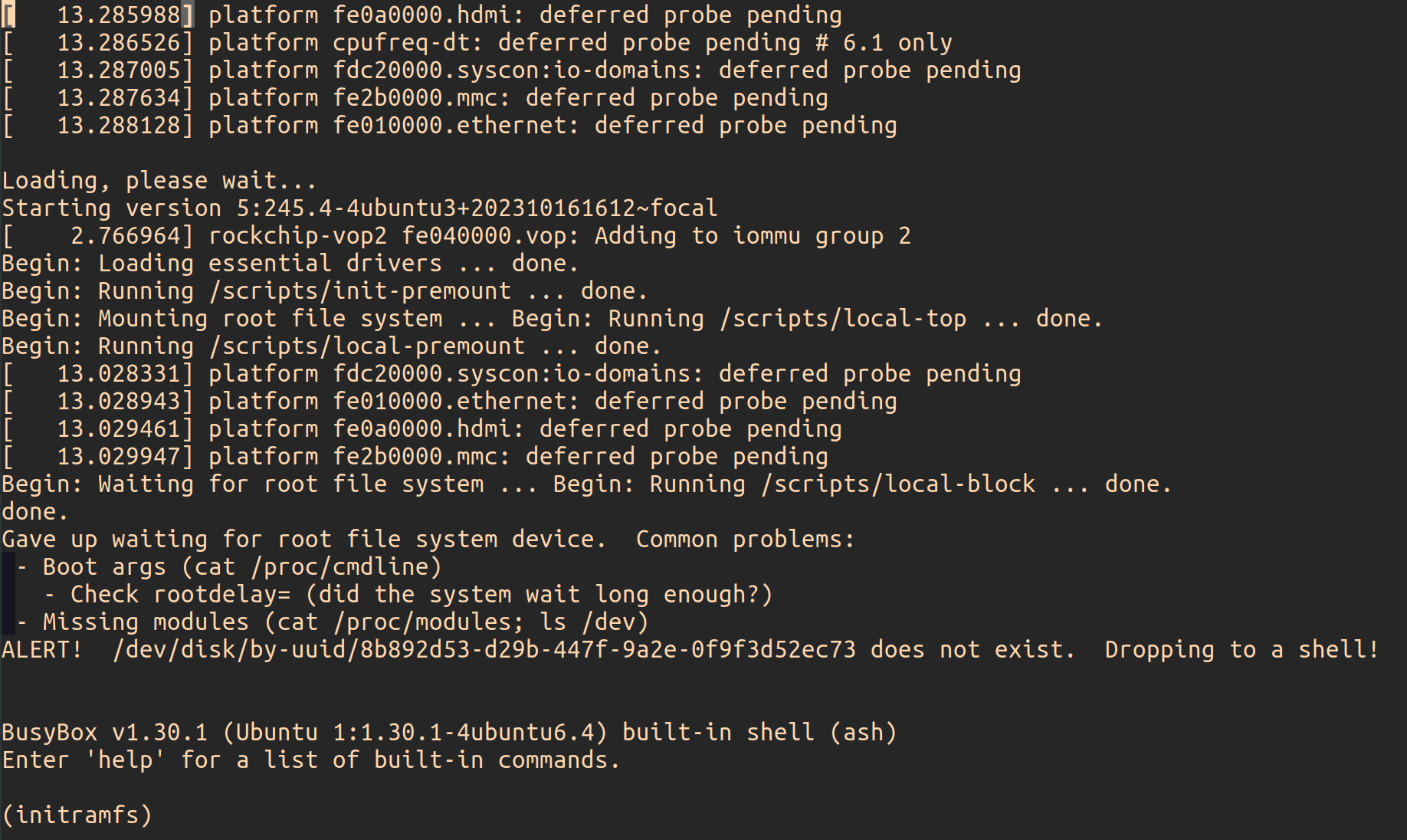
[Linux] deferred probe pending
deferred probe pending..
[Linux] M1/S 커널 드라이버 gpiomem
gpiomem 드라이버 코드 리뷰 입니다.
[Linux] Make와 CMake
리눅스의 빌드 자동화 도구인 Make와 Cmake 사용 포스팅 입니다.
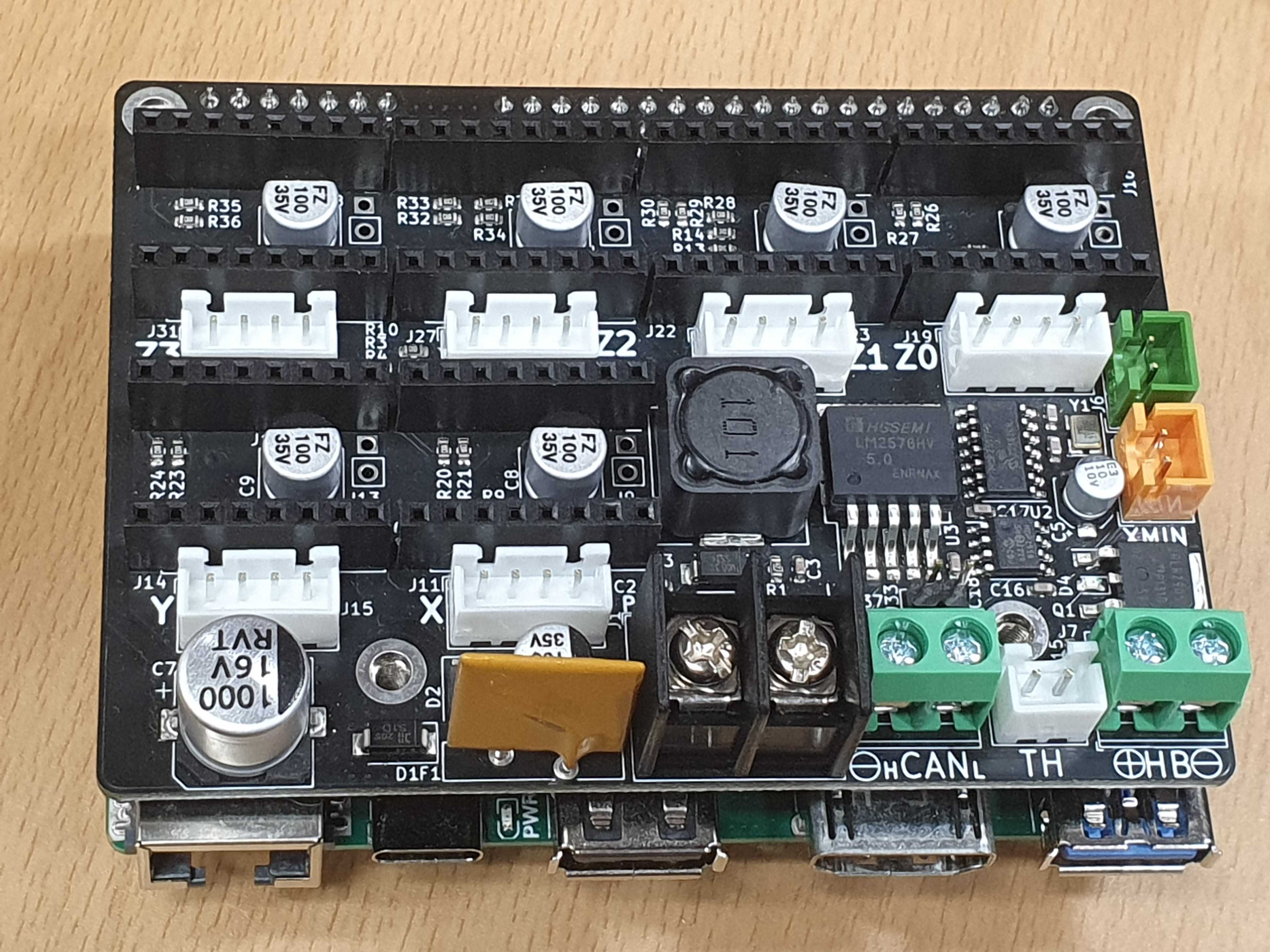
스텝모터 드라이버 쉴드
odroid m1s 전용 스테퍼 드라이버 쉴드 입니다.
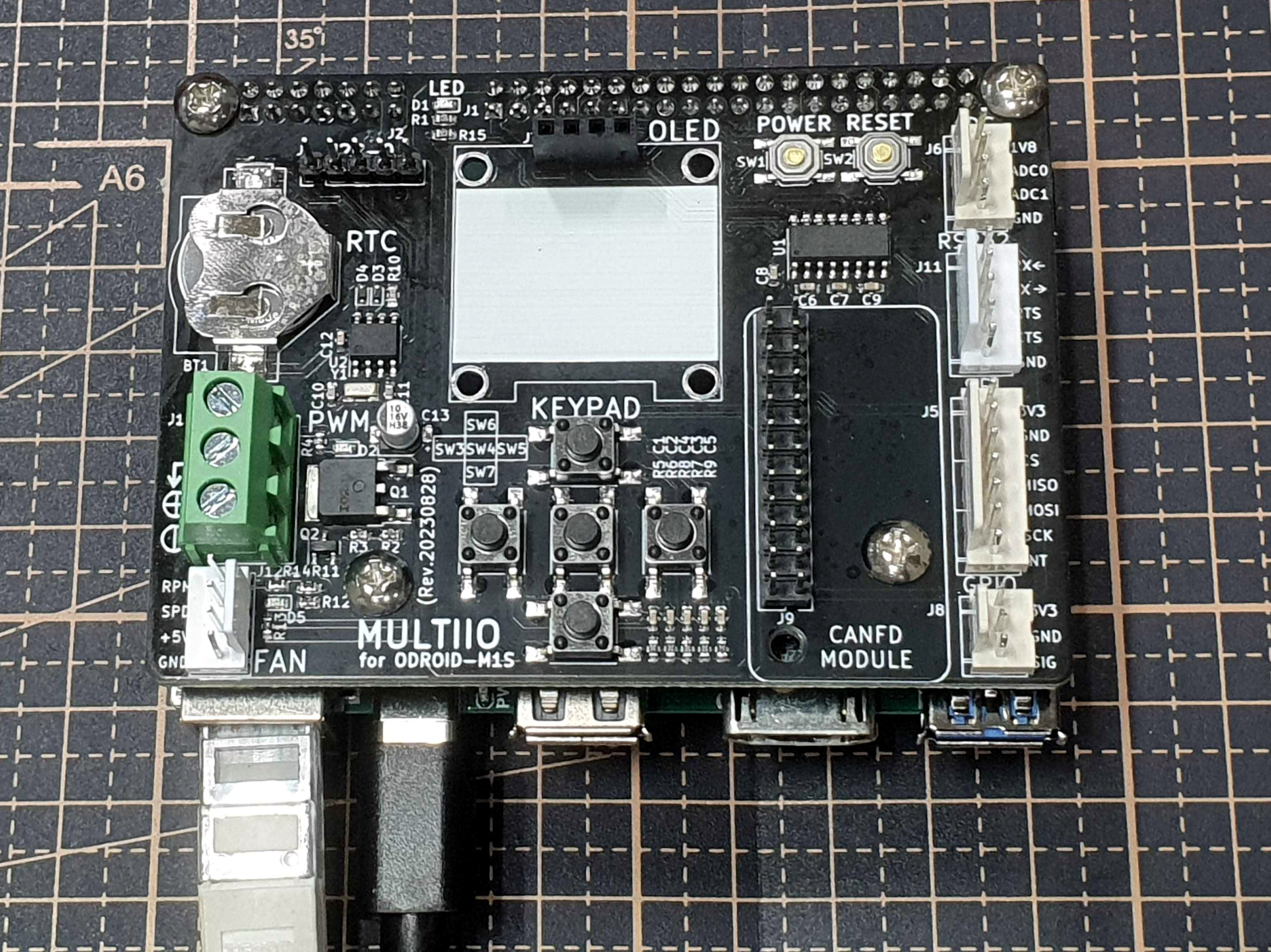
MULTIIO
M1S 보드에 연결해서 사용하는 다양한 인터페이스를 가진 보드.
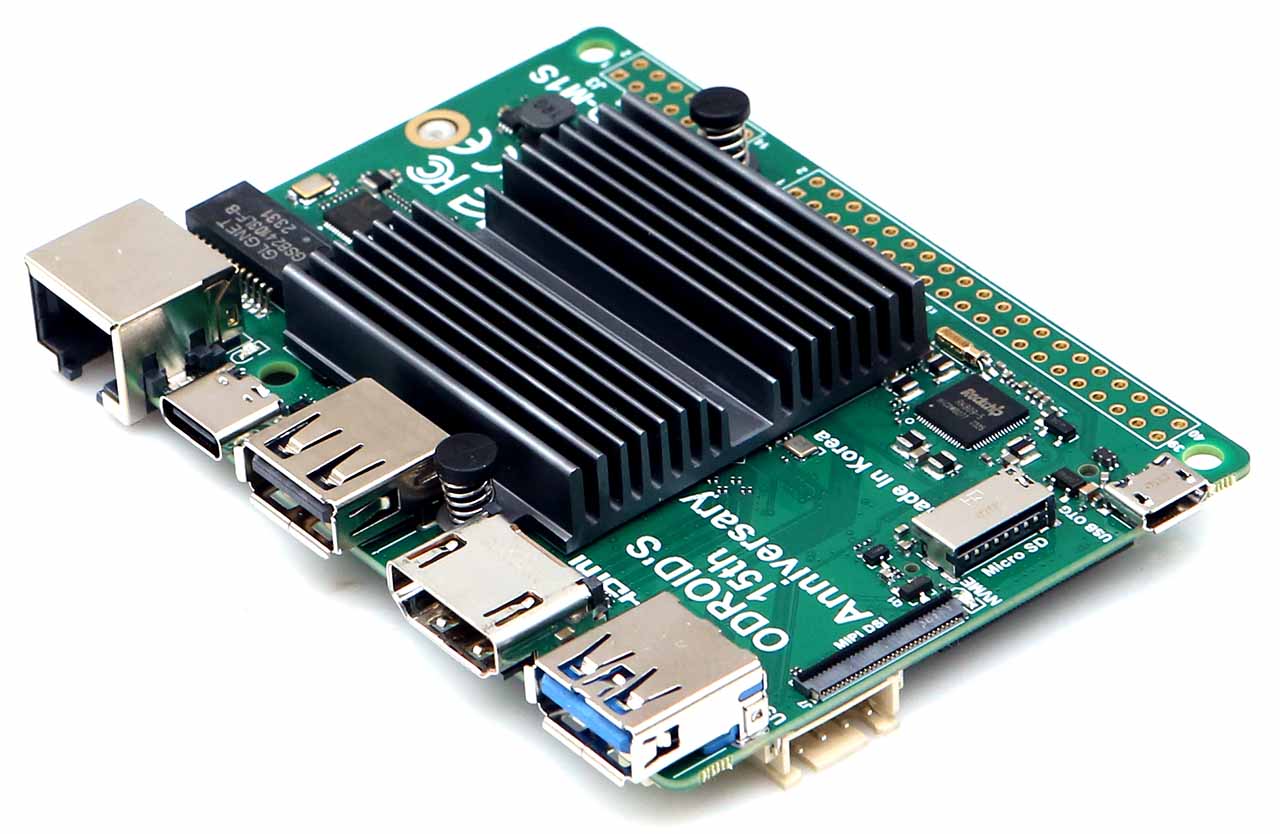
오드로이드 신제품 M1S
하드커널의 새로운 모델 오드로이드 M1S가 출시되었습니다.
트랜지스터 정리
실무를 위한 트랜지스터의 동작과 회로 정리

[Linux] 커널 버전 업그레이드 2(with ODROID-M1)
ODROID -M1의 커널 버전 올리기 (rebase)
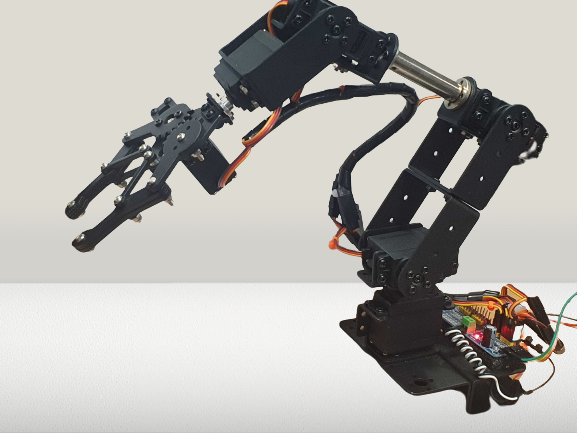
ROS2를 활용한 6축 로봇 제작 가이드 2
Odroid C4로 스마트 로봇 만들기 (ROS2 패키지)

RS 232/422/485
RS232 RS422 RS485 시리얼 통신 방식과 각각의 차이점

[Linux] GPIO 고정하기
device-tree 에서 gpio 모드와 값을 고정하는 방법입니다.
[Linux] NFS 설정하기 (+ 사용 예제)
NFS 설정하는 방법과 NFS 마운트, 실제 사용 예제 입니다.

[Linux] 부팅 USB/SD카드 만들기
etcher, fdisk와 dd 명령어를 사용해서 usb sd카드 포맷하고 부팅디스크 만들기

[Linux] Wifi USB 모듈 사용하기
USB wifi 모듈 (WIFI-5B/5BK)을 데비안 계열 리눅스에서 사용하는 방법입니다.
[Linux] 커널 버전 업그레이드 1(with ODROID-M1)
ODROID -M1의 커널 버전을 4.19.y에서 5.10.y로 업그레이드 하는 과정입니다.
ROS2를 활용한 6축 로봇 제작 가이드 1
Odroid C4로 스마트 로봇 만들기 (조립하기)
ODROID-M1, NPU 사용해 보기 (yolov5)
ODROID-M1은 저렴한 가격에 NPU를 사용할 수 있는 좋은 선택입니다.
[Linux] Debian 패키지 배포하기
데비안 패키지 배포하는 방법입니다. (with launchpad)
[Linux] Debian 패키지 만들기
데비안 패키지 만들기, 데비안 패키징하는 방법입니다.
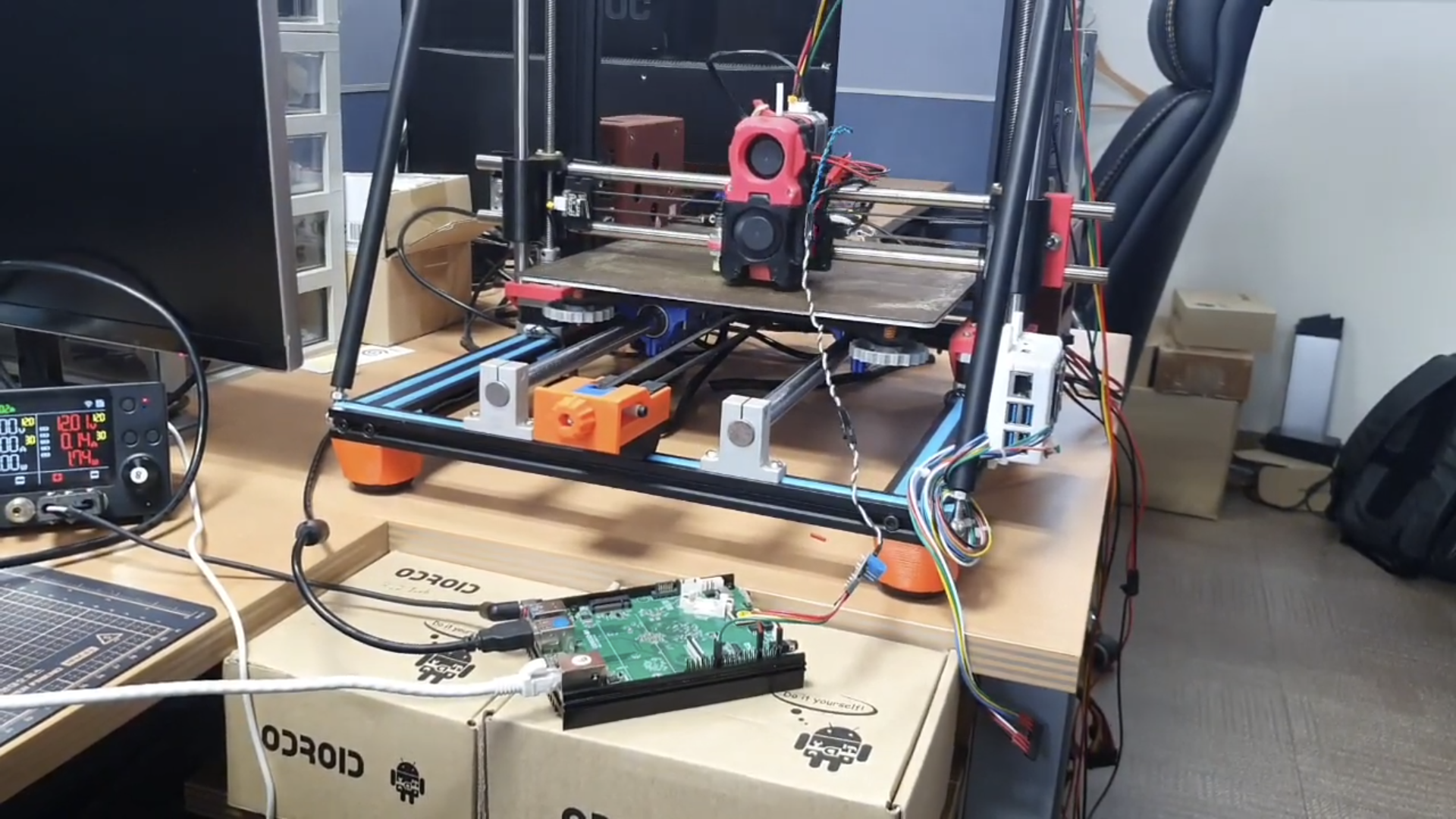
BIGTREETECH EBB42 CAN v1.0 사용하기 with odroid m1
EBB42 CAN보드와 klipper를 활용한 3D 프린터 테스트 (2)
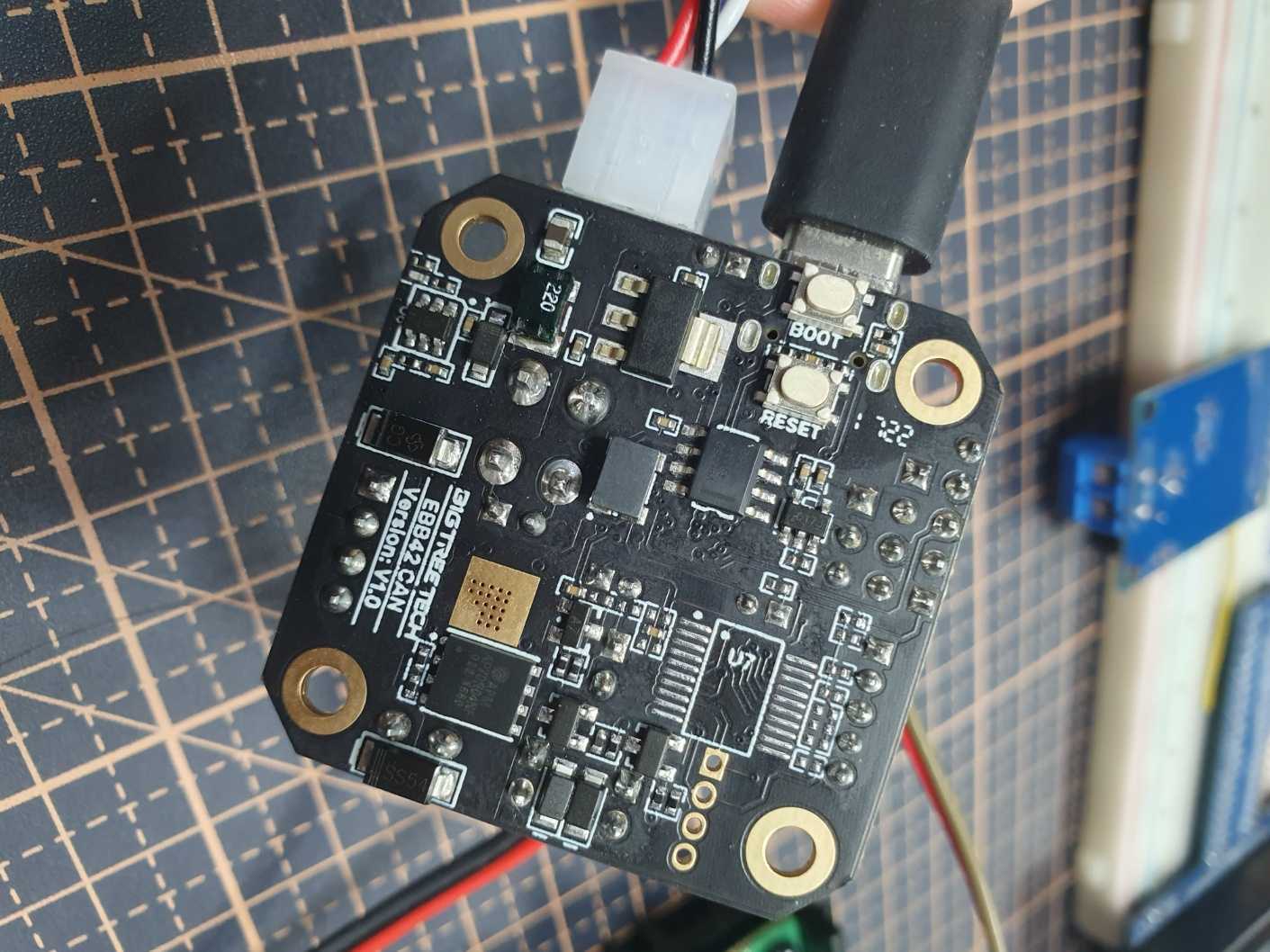
BIGTREETECH EBB42 CAN V1.0 사용하기 klipper firmware 설치
EBB42 CAN보드와 klipper를 활용한 3D 프린터 테스트 (1)
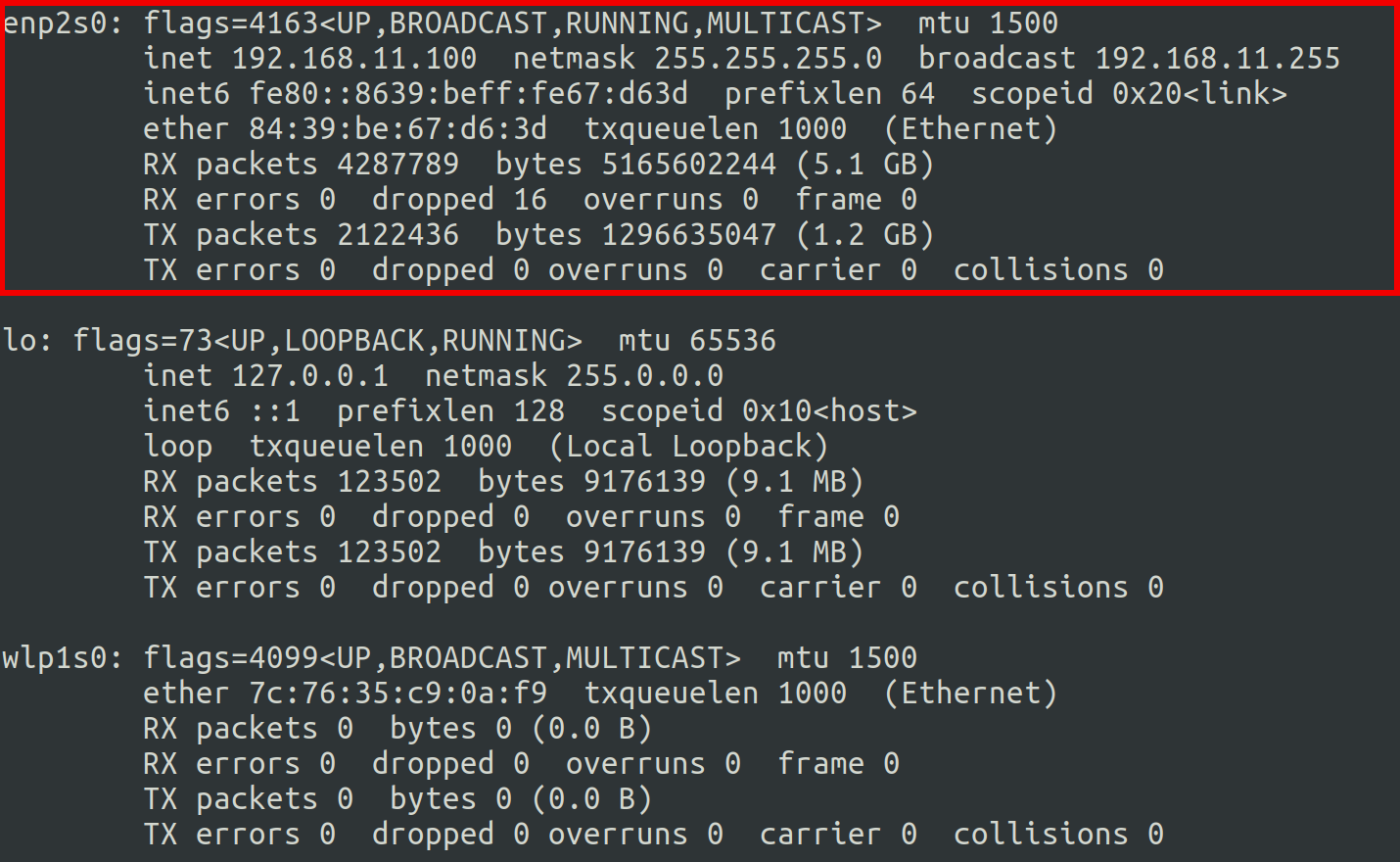
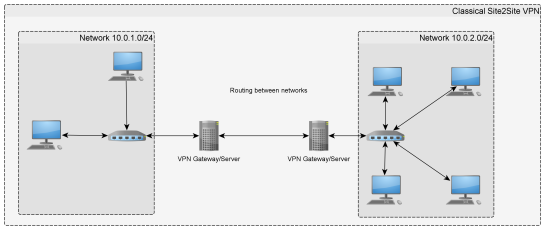
[Linux] Ubuntu 고정 IP 할당
우분투(>= 18.04) 에서 고정 ip 할당
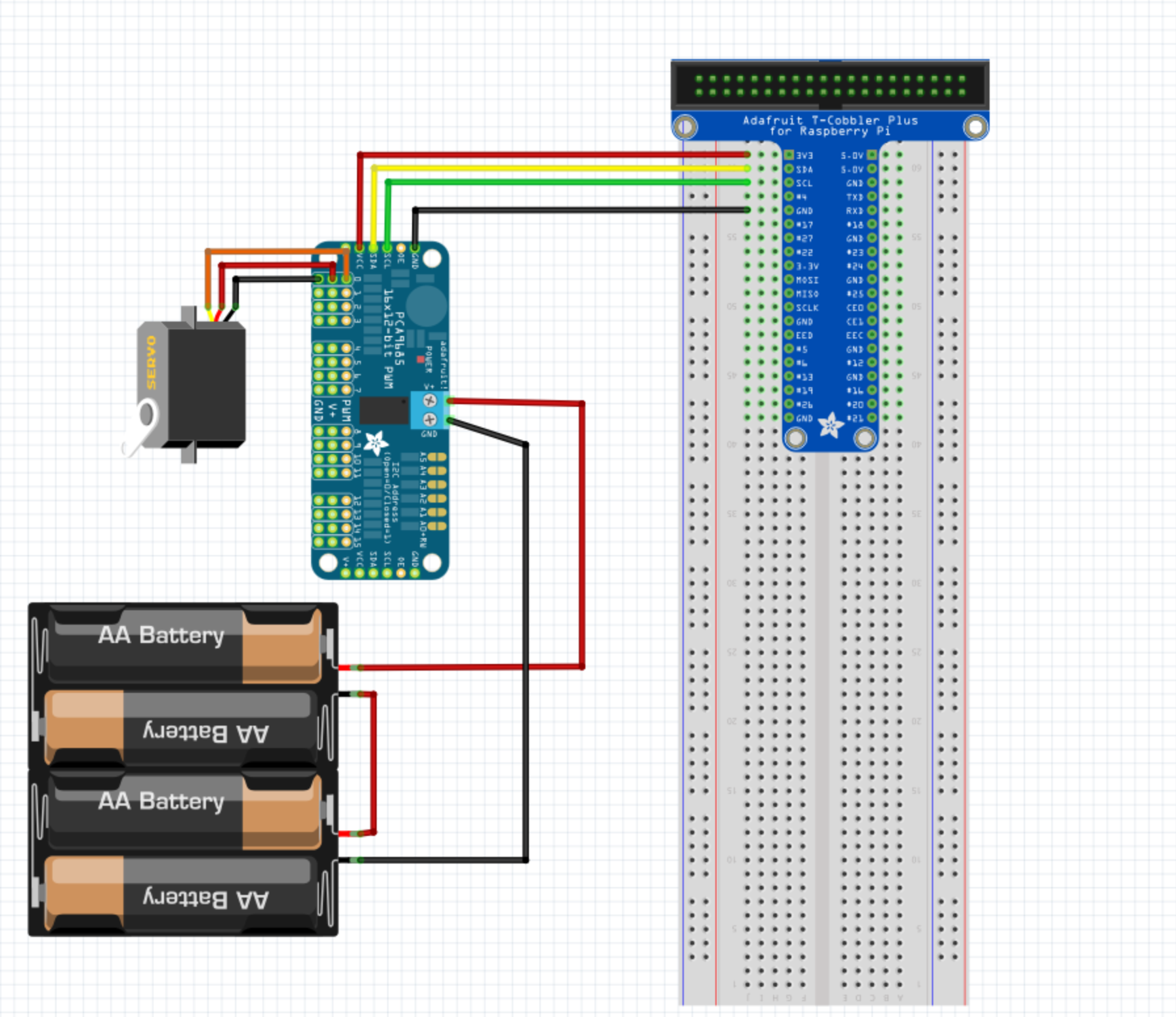
PCA9685 사용하기
adafruit PCA9685 PWM 컨트롤러 사용하기
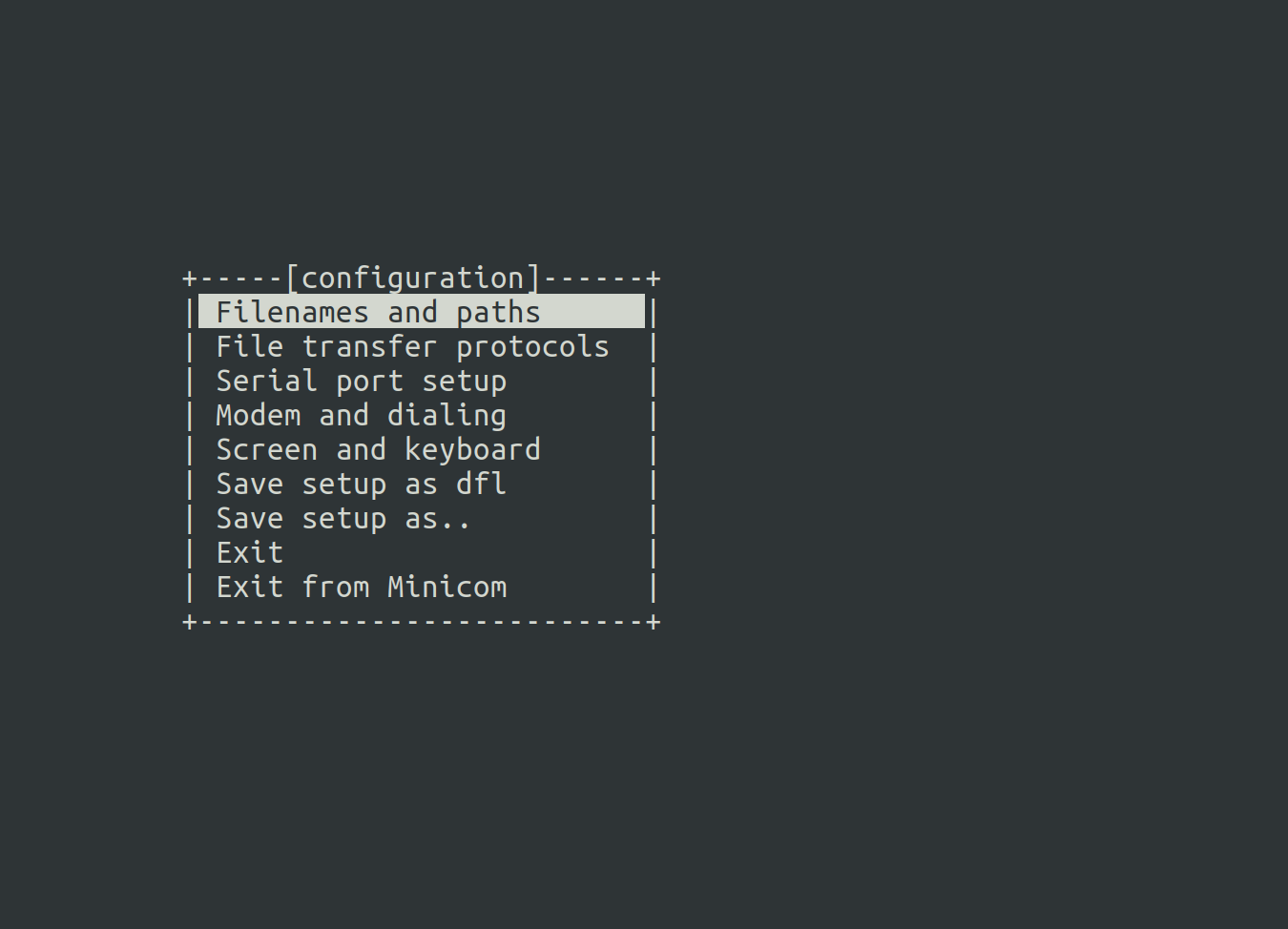
[Linux] Ubuntu minicom 사용하기
minicom 설정하기

[Linux] 커널 빌드 & 설치 (with 라즈베리파이 4)
리눅스 커널 빌드 (with rpi4)