How to use wiringPi?
Intro
This document introduces the basic usage and API of wiringpi with examples.
Wiringpi is a package made to control gpio 40pin with C in Raspberry Pi.
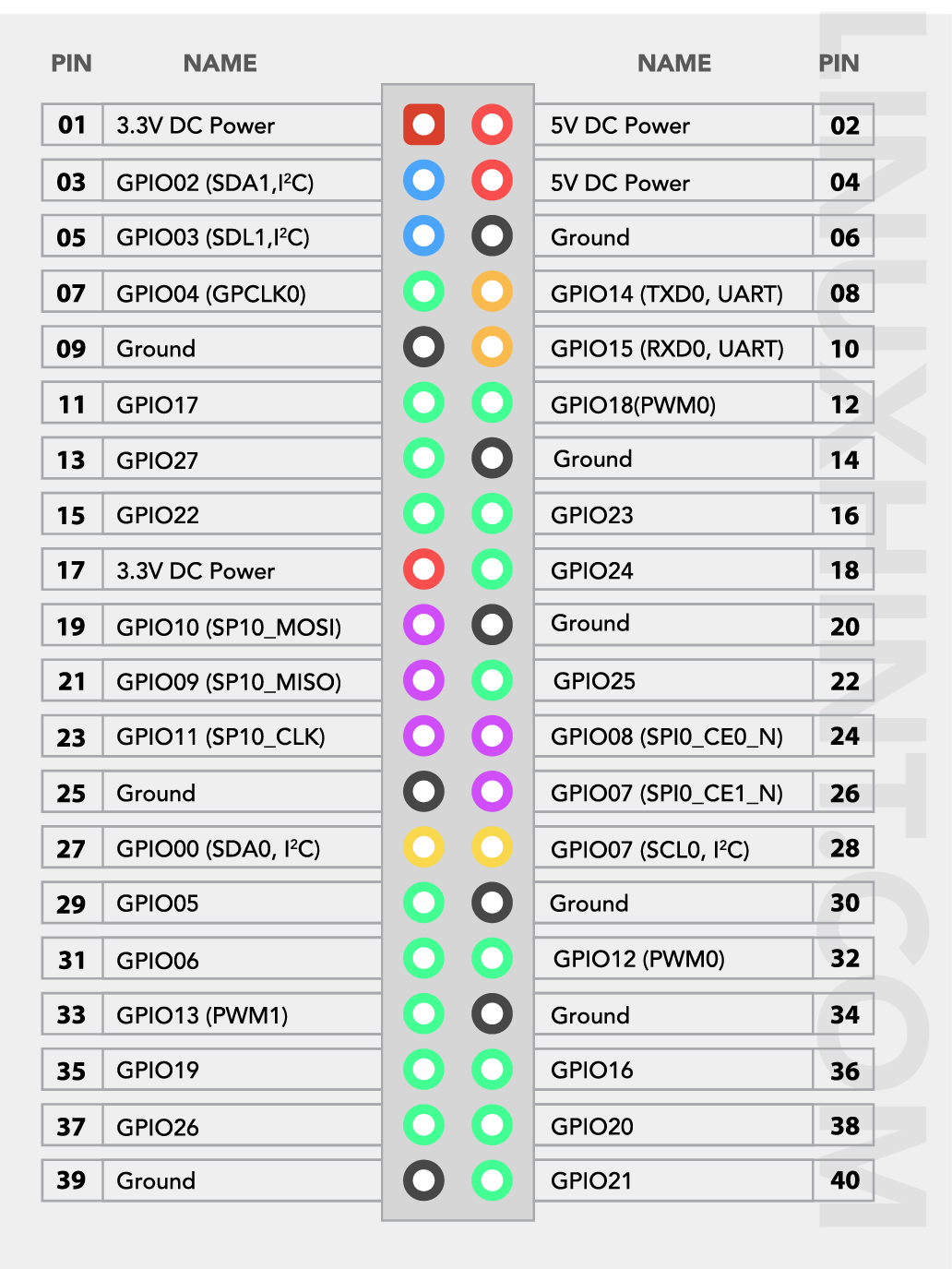
[picture 1] gpio header
Usage
install wiringPi
After boot Raspberry, Install package (git code)
$ git clone https://github.com/WiringPi/WiringPi.git
$ cd WiringPi
$ ./build
Version Check
$ gpio -v
GPIO readall
$ gpio readall
+-----+-----+---------+------+---+---Pi 4b--+---+------+---------+-----+-----+
| BCM | wPi | Name | Mode | V | Physical | V | Mode | Name | wPi | BCM |
+-----+-----+---------+------+---+----++----+---+------+---------+-----+-----+
| | | 3.3V | | | 1 || 2 | | | 5V | | |
| 2 | 8 | SDA.1 | IN | 1 | 3 || 4 | | | 5V | | |
| 3 | 9 | SCL.1 | IN | 1 | 5 || 6 | | | 0V | | |
| 4 | 7 | GPIO.7 | IN | 1 | 7 || 8 | 1 | IN | TxD | 15 | 14 |
| | | 0V | | | 9 || 10 | 1 | IN | RxD | 16 | 15 |
| 17 | 0 | GPIO.0 | IN | 0 | 11 || 12 | 0 | IN | GPIO.1 | 1 | 18 |
| 27 | 2 | GPIO.2 | IN | 0 | 13 || 14 | | | 0V | | |
| 22 | 3 | GPIO.3 | IN | 0 | 15 || 16 | 0 | IN | GPIO.4 | 4 | 23 |
| | | 3.3V | | | 17 || 18 | 0 | IN | GPIO.5 | 5 | 24 |
| 10 | 12 | MOSI | IN | 0 | 19 || 20 | | | 0V | | |
| 9 | 13 | MISO | IN | 0 | 21 || 22 | 0 | IN | GPIO.6 | 6 | 25 |
| 11 | 14 | SLCK | IN | 0 | 23 || 24 | 1 | IN | CE0 | 10 | 8 |
| | | 0V | | | 25 || 26 | 1 | IN | CE1 | 11 | 7 |
| 0 | 30 | SDA.0 | IN | 1 | 27 || 28 | 1 | IN | SCL.0 | 31 | 1 |
| 5 | 21 | GPIO.21 | IN | 1 | 29 || 30 | | | 0V | | |
| 6 | 22 | GPIO.22 | IN | 1 | 31 || 32 | 0 | IN | GPIO.26 | 26 | 12 |
| 13 | 23 | GPIO.23 | IN | 0 | 33 || 34 | | | 0V | | |
| 19 | 24 | GPIO.24 | IN | 0 | 35 || 36 | 0 | IN | GPIO.27 | 27 | 16 |
| 26 | 25 | GPIO.25 | IN | 0 | 37 || 38 | 0 | IN | GPIO.28 | 28 | 20 |
| | | 0V | | | 39 || 40 | 0 | IN | GPIO.29 | 29 | 21 |
+-----+-----+---------+------+---+----++----+---+------+---------+-----+-----+
| BCM | wPi | Name | Mode | V | Physical | V | Mode | Name | wPi | BCM |
+-----+-----+---------+------+---+---Pi 4b--+---+------+---------+-----+-----+
compile
option 1
$ gcc -o main main.c -lwiringPi
option 2
$ gcc -o main main.c -lwiringPi -lwiringPiDev -lm -lpthread -lrt -lcrypt
API
wiringpi supports a number of APIs.
I only cover some of the most commonly used functions.
| Mode | function |
|---|---|
| map | physPinToGpio |
| map | wpiPinToGpio |
| ADC | analogRead |
| ADC | analogWrite |
| GPIO | digitalRead |
| GPIO | digitalWrite |
| GPIO | pinMode |
| I2C | wiringPiI2CRead |
| I2C | wiringPiI2CSetup |
| I2C | wiringPiI2CWrite |
| PWM | pwmSetClock |
| PWM | pwmSetMode |
| PWM | pwmSetRange |
| PWM | pwmWrite |
| SPI | wiringPiSPIDataRW |
| SPI | wiringPiSPIGetFd |
| SPI | wiringPiSPISetMode |
| SPI | wiringPiSPISetup |
| … | … |
Bold text will be covered in detail in the wiringPi code part.
test code
This is test code.
Connect wpi pin 0 and 1. (phys pin #11 and #12)
#include <wiringPi.h>
#include <stdio.h>
#define PINR 0
#define PINW 1
int main()
{
wiringPiSetup();
pinMode(PINR, INPUT);
pinMode(PINW, OUTPUT);
while (1) {
digitalWrite(PINR, HIGH);
printf("pin %d status: %d\n", PINR, digitalRead(PINR));
delay(500);
digitalWrite(PINW, LOW);
printf("pin %d status: %d\n", PINR, digitalRead(PINR));
delay(500);
}
}