yolov8 모델 사용하기 (CPU vs NPU)
소개
NPU는 예전에 한번 포스팅 한 적이 있습니다.
요즘 핫한 AI와 관련된 키워드 인데요, 오드로이드 M1으로 사용해 본적이 있습니다.
M1으로 NPU를 사용했을 땐 mobilenet 과 yolov5s 를 사용했었습니다.
간단한 NPU 설명이 포함된 이전 포스팅.
이번에는 오드로이드 M1S를 사용해서 yolov8s 모델을 사용해 볼 예정입니다.
“YOLO”는 “You Only Look Once”의 약자로, 객체 감지(Object Detection)를 위한 심층 학습 알고리즘 중 하나입니다.
이 알고리즘은 이미지나 비디오에서 여러 객체의 위치를 식별하고 분류할 수 있습니다.
진행 목표
이번에는 특별히 NPU의 강력함을 더 와닿게 하기 위해서,
CPU로 yolov8s를 사용하는 속도와 비교해 보겠습니다.
yolov8 사용하기 (CPU)
yolov8이 업데이트 되면서 훨씬 간단하게 Yolo 모델들을 사용할 수 있게 되었습니다.
CLI 에서 바로 사용 가능하게끔 지원됩니다.
관련 문서를 제공합니다.
CPU governor 세팅하기
최대 성능을 뽑아내기 위해서 governor 를 performance 로 세팅합니다.
$ echo performance | sudo tee /sys/devices/cpu/system/cpu0/cpufreq/scaling_governor
yolo 명령어로 오브젝트 디텍팅 할 때 top 명령어를 통해
싱글코어로 돌아가는 것을 확인했습니다. cpu0 만 세팅하면 됩니다.
멀티 프로세싱이나 GPU를 사용하기 위해서는 CUDA 디바이스를 따로 물려야 하는데,
주변장치 없이 보드의 기본 세팅으로 비교하기 위해 그래도 진행합니다.
python 패키지 설치
yolov8 사용을 위한 패키지를 설치합니다. 가상환경에서 실행 가능합니다.
$ sudo apt install python3-dev python3-pip python3-venv
$ sudo apt install libgl1-mesa-glx
$ python3 -m venv .venv/yolov8
$ source .venv/yolov8/bin/activate
(yolov8) $ python3 -m pip install --upgrade pip
(yolov8) $ python3 -m pip install ultralytics opencv-python onnx onnxruntime
onnx 모델 사용하기
테스트는 onnx모델로 진행할 것입니다.
과정은 pt 모델을 onnx모델로 추출한 다음,
onnx모델로 inference 합니다.
(yolov8) $ yolo export model=yolov8s.pt format=onnx
yolo detect 명령어 입니다.
이미지를 설정하지 않으면 기본으로 bus.jpg jidan.jpg 두가지를 사용합니다.
이미지는 source={input_image} 으로 설정할 수 있습니다.
$ yolo detect predict model=yolov8s.onnx imgsz=640 conf=0.25
model 은 yolov8s.onnx 이미지 크기는 640 전용입니다.
confidence 는 0.25로 세팅합니다.
결과 확인
결과는 다음과 같이 나타납니다.
...
image 1/2 /home/odroid/.venv/yolov8/lib/python3.10/site-packages/ultralytics/assets/bus.jpg: 640x640 4 persons, 1 bus, 2338.5ms
image 2/2 /home/odroid/.venv/yolov8/lib/python3.10/site-packages/ultralytics/assets/zidane.jpg: 640x640 2 persons, 1 tie, 2154.3ms
...
bus.jpg 로 비교할 것이기 때문에 첫번째 결과 2338.5ms 를 사용할 것입니다.
output은 run/detect/predict 에 저장됩니다.

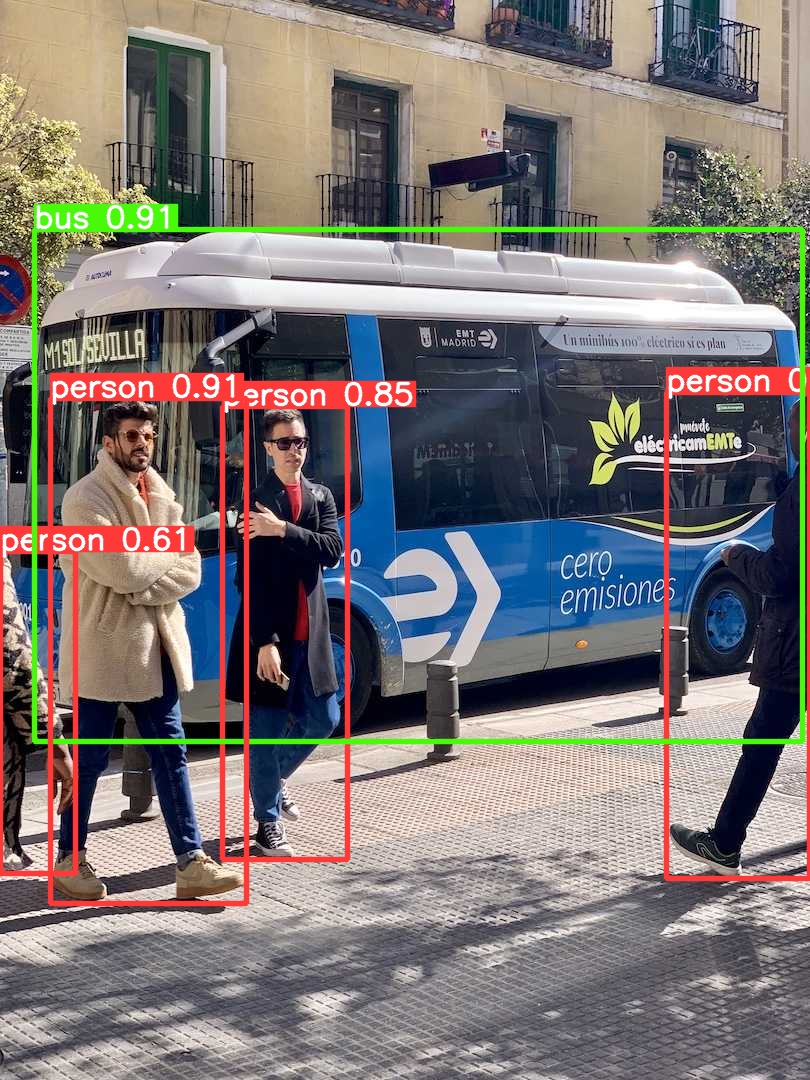
[picture 1] Result of yolov8 demo (cpu)
yolov8 사용하기 (NPU)
NPU governor 세팅하기
속도를 최대한으로 끌어올리기 위해 governor를 performance로 세팅하겠습니다.
$ echo performance | sudo tee /sys/class/devfreq/fde40000.npu/governor
npu 오버레이 추가하기
M1S는 전작인 M1과 다르게, petitboot 가 없습니다.
따라서 petitboot 를 스킵하는 과정은 없습니다.
rknpu 오버레이를 추가합니다.
$ sudo vi /boot/config.ini
[generic]
overlay_resize=16384
overlay_profile=
overlays="rknpu"
[overlay_custom]
overlays="i2c0 i2c1"
[overlay_hktft32]
overlays="hktft32 ads7846"
리부팅 합니다.
리부팅 이후 커널 모듈 insmod
$ sudo modprobe rknpu
$ lsmod | grep rknpu
rknpu 49152 0
의존성 확인하기
M1S에서 제공하는 NPU에는 크게 두가지 의존성이 있습니다.
rkrga 드라이버 버전과 librga 버전입니다.
전자는 rga 드라이버 자체의 버전이고, 후자는 예제에서 사용할 rga 관련 라이브러리 버전입니다.
버전 확인은 공식 문서에서 확인할 수 있습니다.
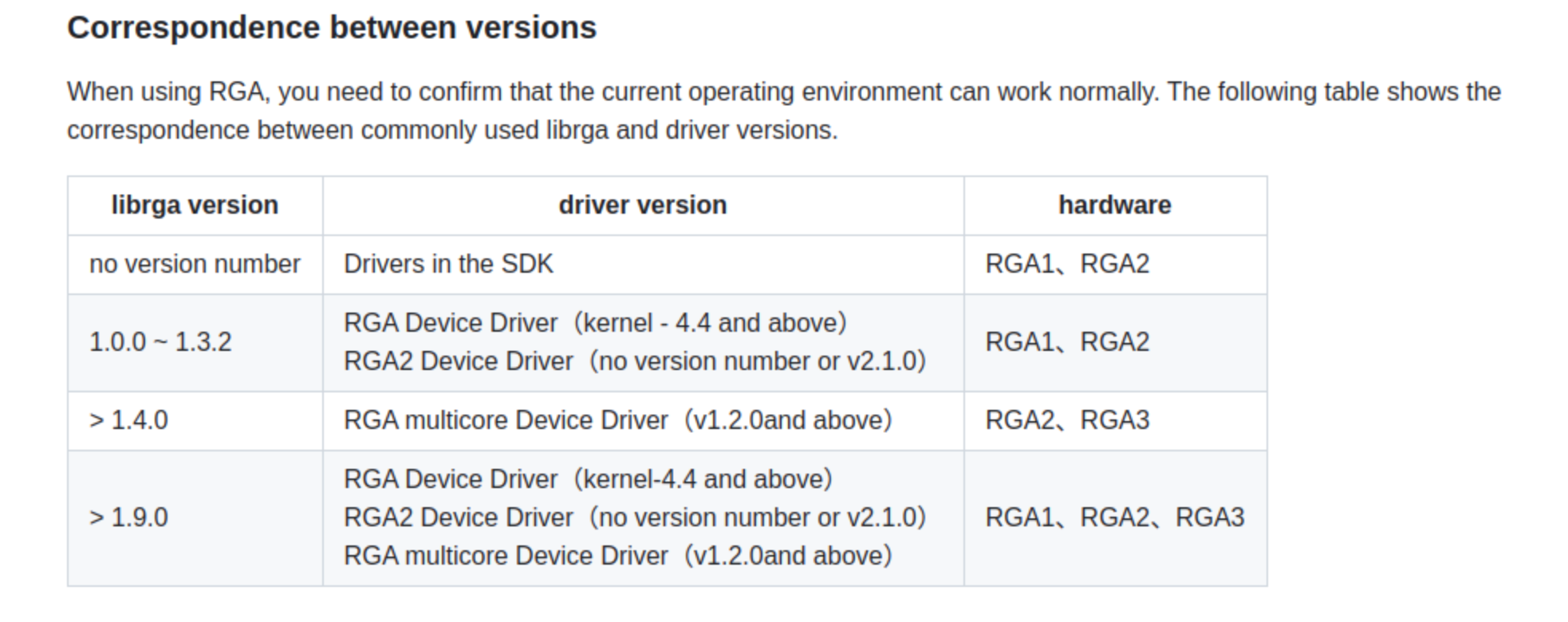
[picture 2] correspondence between versions
보드에서 rkrga 드라이버 버전을 확인해 보겠습니다.
$ sudo su
# cat /sys/kernel/debug/rkrga/driver_version
RGA2 Device Driver: v2.1.0
# exit
현재 드라이버 버전은 v2.1.0입니다.
librga 버전을 1.0.0 ~ 1.3.2 버전을 사용하거나 1.9.0 버전 이상을 사용하면 될 것 같습니다.
예제 다운로드
예제 프로젝트를 다운로드 받고, 먼저 librga 버전을 확인합니다.
$ cd
$ git clone -b bench https://github.com/how2flow/rknn_model_zoo.git
$ cd rknn_model_zoo/3rdparty/librga/Linux/aarch64
$ strings librga.so | grep rga_api | grep version
rga_api version 1.9.1_[4]
librga가 rkrga 드라이버와 호환이 되는 버전이니 계속 진행합니다.
빌드스크립트를 실행합니다.
$ cd ~/rknn_model_zoo
$ sudo chmod +x build-linux.sh
$ ./build-linux.sh -a aarch64 -t rk3566 -d yolov8
예제가 빌드되었으면 결과를 확인합니다.
$ cd install/rk356x_linux_aarch64/rknn_yolov8_demo
$ sudo ./rknn_yolov8_demo model/rk356x_yolov8s.rknn model/bus.jpg
error while loading shared libraries...
만약 다음과 같은 에러가 나타난다면 shared object가 링크되지 않아서 발생하는 문제입니다.
./rknn_yolov8_demo: error while loading shared libraries: librknnrt.so: cannot open shared object file: No such file or directory
lib 디렉토리 안에 있습니다. 링크 시켜줍니다.
$ export LD_LIBRARY_PATH=${LD_LIBRARY_PATH}:./lib
$ sudo ldconfig
다시 실행합니다.
$ sudo ./rknn_yolov8_demo model/rk356x_yolov8s.rknn model/bus.jpg
결과 확인
...
rknn_run
loop count = 10 average run 74.817000 ms
write_image path: out.png width=640 height=640 channel=3 data=0x55a957e030
위와 같은 로그가 나타나면 성공입니다.
여러번 실행해 보았는데 약 73 ~ 75 ms 왔다갔다 합니다.

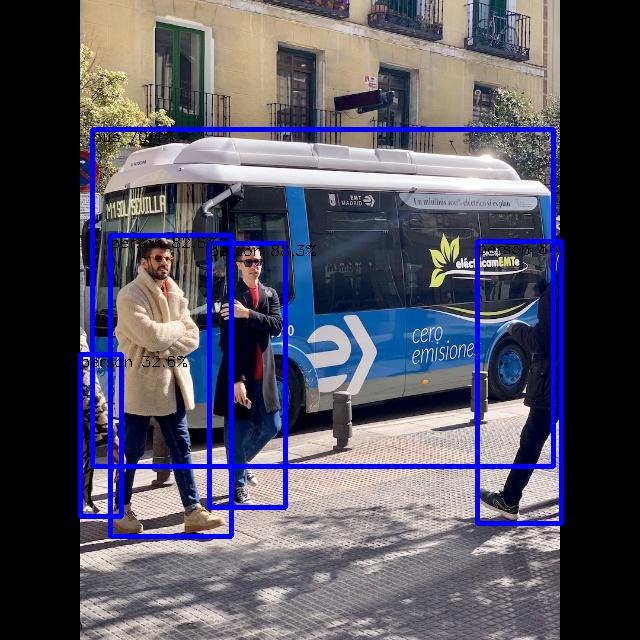
[picture 3] Result of yolov8 demo (npu)
사진의 사이즈가 약간 다른것은 모델 학습시 사용한 이미지의 차이가 있기 때문입니다.
하지만 결과에 큰 영향을 줄 만큼은 아닙니다.
CPU vs NPU
inference time을 측정한 결과입니다.
약 100회 정도 실행한 평균값이고 소수점 셋째자리에서 반올림 했습니다.
| yolov8 | CPU | NPU |
|---|---|---|
| M1S | 2338.84 | 74.20 |
단위는 ms 이고 confidence 는 동일하게 0.25 입니다.
속도는 NPU가 CPU 대비 약 32배 정도 빠릅니다
Leave a comment